
引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者

引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者

引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者
在当今科技蓬勃发展的时代背景下,智能仓储系统以其自动化、智能化的特点,在物流行业中占据着举足轻重的地位。尤其是自动引导车(AGV)技术的日益精进,为仓储系统的高效运作提供了强有力的技术支撑。然而,在传统的实训教学环节中,尽管学生能够通过实体操作接触并学习智能仓储移动机器人的控制原理与技能,但实际操作过程中存在的设备损耗成本高昂、场地空间限制、潜在安全风险以及训练效率低下等问题,使得这种传统教学方式面临严峻挑战。为了有效解决这一问题,北京象新力自主研发了“智能仓储移动机器人控制虚拟仿真实验软件”。这款软件凭借其前沿的实验设计理念和先进的虚拟现实技术手段,成功打破了传统实训模式的局限性,为智能仓储机器人控制的教学实践开辟了一条全新的道路。
一、产品介绍
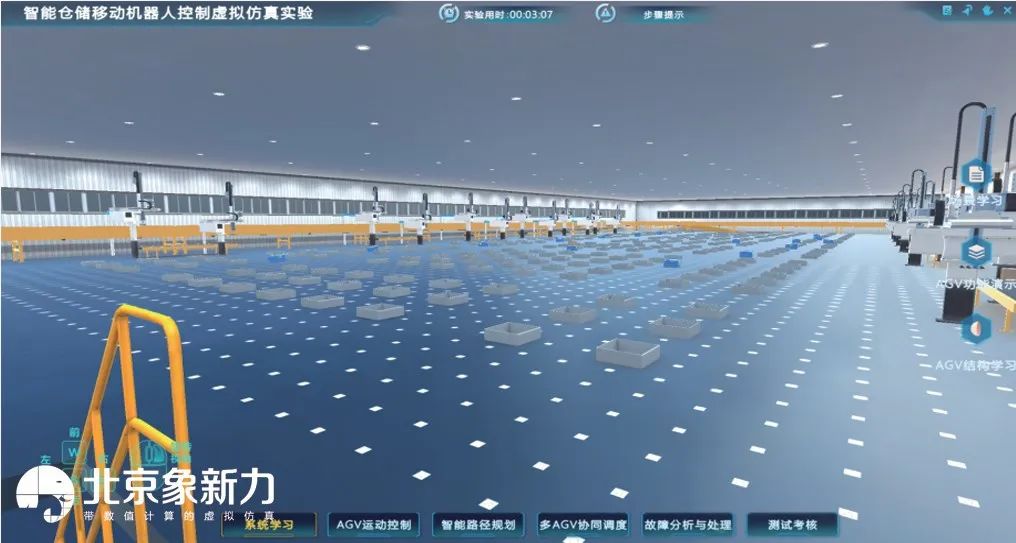
本实验依照圆通快递现场进行实景三维搭建。3D设备真实,与实际设备结构一致。包括上料机上料系统、AGV 投放包裹系统、下料口接收包裹系统、分拣仓库、包裹运送皮带机等。学生可通过三维实验交互加深对智能仓储相关设备的认知。实验中还以三维动画特效的形式展示了AGV的充电原理、二维码识别原理、AGV包裹投放原理以及AGV行走/转向原理。
二、产品特色
智能仓储移动机器人虚拟仿真实验由系统学习、AGV运动控制、智能路径规划、多AGV协同调度、故障分析与处理、测试考核六个模块组成;实验可通过设置不同参数,配合虚拟场景,实现在虚拟场景内,通过移动机器人的控制算法完成AGV的自主避障,自主寻路、自主纠偏。实验过程中会对产生的数据进行记录并以可视化的图表以及曲线进行展示。通过自由的参数设置、投放点选择等交互操作,让实验者了解AGV的工作原理以及加深对模糊控制算法、A*算法、Dijkstra算法等各种智能算法的学习。

三、实验内容
○ 单输入单输出模糊控制器设计
○ 双输入单输出模糊控制器设计
○ 模糊控制循迹系统
○ 模糊控制防撞系统
○ 单AGV A*算法路径规划设计
○ 单AGV Dijkstra算法路径规划设计
○ AGV智能避障设计
○ 多AGV智能调度系统设计
○ 多AGV路径协调系统设计
○ 多AGV人工调度系统设计

四、支撑课程
○ 面向对象程序设计
○ 智能算法
○ 智慧物流与智能仓储
○ 控制理论
○ 机器人学