
引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者

引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者

引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者
在数字化时代的大潮中,高等教育领域正以前所未有的热情与速度拥抱数智化进程,致力于通过技术创新提升教学效率,丰富教学手段,拓宽实践边界。其中,虚拟仿真技术作为一种极具前瞻性的技术手段,以其独特的技术优势和广泛的应用场景,扮演着推动高等教育数智化转型的关键角色。北京象新力作为数智化虚拟仿真实训引领者,以其专业研发的虚拟仿真系列产品,为众多高校构建起高效、安全且具有深度沉浸感的实验教学新生态,助力高校实训教学,构建沉浸式教学体验。
一、虚拟仿真平台的定义及技术基础
北京象新力虚拟仿真平台是一种高度集成的数字化教育工具,依托于先进的数值仿真、计算机辅助工程仿真算法技术、虚拟现实(VR)、增强现实(AR)等前沿技术,构建出与现实世界高度相似甚至超越现实的学习环境。在这个平台上,学生可以进行互动式、沉浸式的实训操作,不受时空限制地探索复杂概念,实践难以在现实中实现的操作,从而获得近乎真实的实训体验。
二、虚拟仿真平台相较于传统实训教学模式的优势
传统的实训教学方式存在着高投入、高损耗、高风险及难实施、难观摩、难再现等问题,而虚拟仿真平台不仅能为学生提供安全、高效、经济的实训环境,还能培养学生的创新能力和实践能力。
☑ 低成本与高拓展性
○ 资源节约:传统实训往往需要大量实物材料和设备,这不仅成本高昂,还受限于物理空间和维护成本。虚拟仿真平台则无需实体设备,大大减少了初始投资和维护费用。
○ 可扩展性:一旦创建,虚拟实训资源可以被无限复制和使用,满足大规模教学需求,而不会增加额外成本。
☑ 安全性与高重复性
○ 无风险学习:在危险或高风险环境下(如化工实验、机械操作),虚拟仿真实验室提供了一个安全的实践场所,学生可以在不担心实际伤害的情况下进行操作和学习。
○ 错误容忍度高:允许学生在虚拟环境中犯错并从中学习,而无需承担现实世界中的后果,这对于技能的熟练掌握至关重要。
☑ 灵活性与可访问性
○ 时间与地点自由:虚拟实训不受地理位置和固定时间的限制,学生可以根据自己的日程安排进行学习,增强了学习的自主性和灵活性。
○ 资源平等分配:无论身处何处,只要有互联网连接,所有学生都能访问相同的高质量实训资源,促进了教育公平。
☑ 个性化学习路径
○ 适应性学习路径:虚拟仿真平台可以根据学生的学习进度和能力,提供定制化的实训内容,确保每个学生都能在最适合自己的速度和深度上学习。
○ 即时反馈:系统能够实时评估学生的表现,并提供即时反馈,帮助学生迅速纠正错误,加速技能掌握过程。
☑ 创新性与复杂性
○ 跨学科整合:虚拟平台支持跨学科项目的开发与实验,鼓励学生将不同领域的知识融合,促进创新思维的培养。
○ 复杂情境模拟:能够模拟现实世界中复杂的、甚至是极端的情境,为学生提供处理紧急情况和解决复杂问题的实践经验。
☑ 数据驱动的评估
○ 学习分析:通过收集和分析学生在虚拟实训中的数据,教师可以获得对学生学习进度和表现的深刻洞察,进而调整教学策略,提高教学质量。
三、北京象新力助力高校实训教学案例
北京象新力依托先进的数值仿真、多学科交叉领域的云仿真计算平台以及三维建模等技术,精心构建了一个个与真实工作环境高度相似的虚拟仿真软件,为高等院校实训教学提供了全新的解决方案。
案例:固定翼飞行器控制及协同编队虚拟仿真实验软件

随着无人机技术的迅猛发展及其在各领域的广泛应用,对无人机操控人员的专业技能和实践经验提出了前所未有的高要求。传统的实训教学方式虽能在一定程度上提升学生的实际操作能力,但在成本控制、安全性保障以及环境适应性方面存在明显不足,难以满足新时代对无人机人才综合培养的迫切需求。为此,北京象新力科技有限公司研发了“固定翼飞行器控制及协同编队虚拟仿真实验”软件,旨在突破传统教学瓶颈,借助数字化和沉浸式的虚拟环境,为学生构建一个全面而高效的固定翼飞行器控制及协同编队训练平台。
☑ 产品介绍
本实验以固定翼飞行器为载体,综合运用自动控制理论和技术,通过交互操作来实现固定翼飞行器的控制和协同编队控制器设计实验。本实验的开展强化了学生综合理解和运用自动控制理论和技术,培养了学生整体设计、综合判断和灵活运用知识解决实际工程问题的全局意识和综合能力。
☑ 产品特色
本实验以自动控制原理为理论体系架构,实现了数学、物理、计算机、电气电子、自动化等学科的知识交叉和融合。能够引导学生从系统的角度来思考问题,锻炼针对具体问题进行系统分析、设计并研究解决方案的能力,培养多学科协同下的团队合作精神和科学人文素养。实验系统以3D模型构建了固定翼飞行器的物理对象,能直观地以360度旋转的方式了解实验模型的各个部分构成。通过Unity引擎+WebGL3D绘图协议来模拟实现实验对象的上升、下降、旋转等动作,让学生能直观感受实验对象的运动。给出了实时运动轨迹曲线,极大方便了学生的系统分析。同时通过键盘和鼠标使实验者双手在3D场景中操作,让学生如同亲临实境,感受互动。
☑ 实验内容
○ 飞行器分类
○ 飞行器建模
○ 飞行器PID控制
○ 飞行器ADRC控制
○ 人工势场避障
○ 多飞行器集中式编队控制
○ 基于距离的有领导者协同编队控制
○ 基于偏移的有领导者协同编队控制
○ 有虚拟中心的无领导者分布式协同编队实验
○ 无虚拟中心的无领导者分布式协同编队实验
☑ 支撑课程
○ 控制系统仿真
○ 自动控制原理
○ 飞行器控制
○ 无人机编队控制
○ 机器人学
案例:智能送药机器人虚拟仿真实验软件
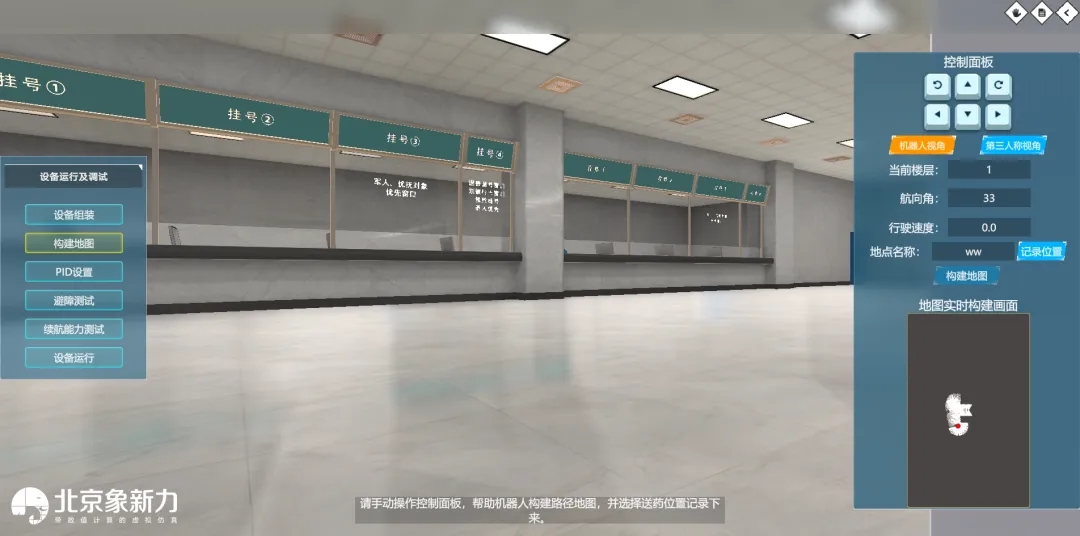
随着全球人口老龄化趋势加剧,医疗健康需求急剧增长,智能送药机器人作为提高医疗服务效率的重要工具,正逐渐受到广泛的关注和应用。然而,在传统的实训教学环节中,尽管学生能够通过实体操作接触并学习智能送药机器人的控制原理与技能,但实际操作过程中存在的设备损耗成本高昂、场地空间限制、潜在安全风险以及训练效率低下等问题,使得这种传统教学方式面临严峻挑战。为了有效解决这一问题,北京象新力研发了“智能送药机器人虚拟仿真实验”软件。这款软件凭借其前沿的实验设计理念和先进的虚拟仿真技术手段,成功打破了传统实训模式的局限性,为智能送药机器人控制的教学实践开辟了一条全新的路径。
☑ 产品介绍
本虚拟仿真实验项目以隔离医院为背景,智能送药机器人为主线,将智能送药机器人认知、控制系统设计、通讯设置、智能路径规划等进行综合设计,将各过程相关基本理论、基本操作、设备结构等知识贯穿于操作全过程。本项目依托真实医院智能机器人工程,由浅到深,循序渐进,从学生实践需求出发,构建了认知学习、控制系统设计、构建地图、PID设置等多个模块实验教学内容。
☑ 产品特色
本实验采用考核与探究相结合的方法,不断地引导学生思考与实践,形成以项目目标为导向的闭环教学思路。软件利用Maya技术、U3D相关代码控制,模拟出一个三维空间的高度仿真的医院全场景。全平台的各模型各设备均以逼真的三维模型为基础,让使用软件者更能清楚直观的看到虚拟操作运行仿真实训平台中的实际场景和地形地貌等,有一个整体的感性认识,和局部的具体认识。
☑ 实验内容
○ 认知学习
○ 控制系统设计
○ 设备运行及调试
☑ 支撑课程
○ 机器人控制技术
○ 工业机器人控制系统
○ 自动控制原理
案例:工程热力学基础虚拟仿真软件
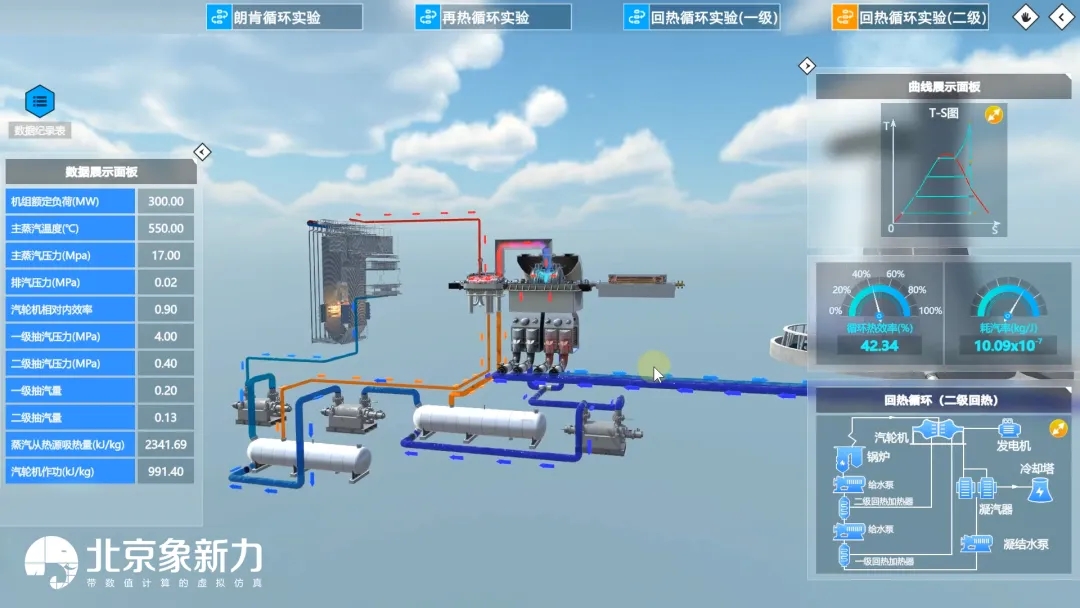
工程热力学基础实验作为理工科教育的重要组成部分,承载着培养未来工程师理论素养的重任。传统的实训教学模式在培养学生实际操作技能上发挥着重要作用,然而,在面对设备损耗老化、场地空间限制、潜在安全风险以及效率低下等现实挑战时,其局限性逐渐显现,无法充分满足现代教育对于理论与实践相结合的新要求。为了解决这些难题,北京象新力科技有限公司研发了“工程热力学基础虚拟仿真软件”,该软件以其独特的实验设计和技术手段,为工程热力学专业课的实训教学提供了安全、高效、深度整合理论与实践的新型教学工具。
☑ 产品介绍
本实验的底层算法完全采用机理的物理模型和数学建模,用数值模拟的算法对实验数据进行计算,数据具有极大的精度和灵活性。
实验设备、实验器材、测量表计等装置均与实际实验室相符。泵、阀门、喷管、管道的外观与真实设备一致。设备运行时伴随有设备转动、震动、指示灯开启等现象与现实一致。实验中对设备的操作也与真实操作相一致。
☑ 实验内容
○ 二氧化碳临界状态观察实验
○ 气体热力学过程及分析虚拟仿真教学实验
○ 饱和蒸汽特性实验
○ 气体定压比热容实验
○ 朗肯循环虚拟仿真教学实验
○ 测定二氧化碳P-V-T关系曲线及临界参数实验
○ 饱和蒸汽压力和温度关系实验
○ 喷管中空气流动特性虚拟仿真实验
○ 空气定压比热容测量虚拟仿真实验
○ 绝热节流效应测定虚拟仿真实验
○ 气体热力学过程及参数分析虚拟仿真教学实验系统
○ 朗肯循环原理教学软件
○ 燃气动力循环虚拟仿真实验软件
○ 压气机工作过程与性能测试实验软件
☑ 支撑课程
○ 工程热力学
总上所述,虚拟仿真平台,不仅革新了实训教学的传统模式,更开创了一条通往未来教育的新路径。通过深度融合虚拟现实、增强现实以及先进的仿真算法,该平台为学生搭建了一个无边界的学习空间,使他们在安全可控的环境中大胆探索、创新实践,极大地提升了学习效果与兴趣。随着技术的不断进步与应用场景的日益丰富,虚拟仿真平台将成为连接理论与实践的桥梁,激发学生潜能,培养适应未来社会需求的高素质人才。