
引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者

引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者

引领数智未来,共创智能教育新纪元
第五代数字孪生技术先驱者
一、前言
智能仓储场景中,移动机器人(Automated Guided Vehicle, AGV)自主进行货物包裹分拣及投递的控制与调度,是智能仓储高效运行的核心技术内容,也是智能控制理论及方法的一个典型应用场景。本虚拟仿真实验以菜鸟速递某管理区总部的智能仓储AGV分拣投递系统为原型,融合《智能控制基础》、《人工智能与模式识别》课程中的理论知识,开发为智能仓储移动机器人控制虚拟仿真实验。
二、软件介绍
本项目的三维场景以及模型均是现场取材于菜鸟速递圆通华东管理区总部的智能仓储分拣投递系统,包括工作场景、设备组成、工作流程等,包括关键设备移动机器人(Automated Guided Vehicle, AGV)的结构装配、功能及其运动规律。智能仓储分拣投递系统大厅为本虚拟仿真的工作场景,系统的主要设备包括:传输带、上料机、下料口、收料网、地标二维码及多个AGV。

三、实验内容
整个软件包含“系统学习”、“AGV 运动控制”、“智能路径规划”、“多 AGV 协同调度”、“故障分析与处理”五个模块,每个模块均包含多个交互步骤。
1、系统学习
用户选择“系统学习”模块,使用鼠标和键盘在场景中进行漫游,可以快速将视角定位到选中的设备并查看对应的设备介绍。同时还可以拖动设备库中的设备安装到 AGV 的对应位置中,查看 AGV 结构及结构原理。

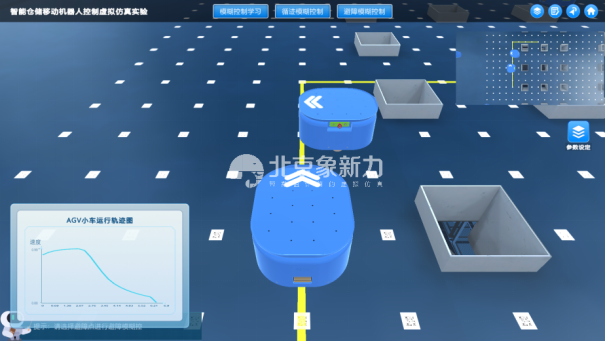
2、AGV 运动控制
用户选择“AGV 运动控制”模块,系统会介绍模糊控制相关的知识点,并进行循迹模糊控制、避障模糊控制实验,用户可以查看运行结果并对规则表进行优化重新开始运行。
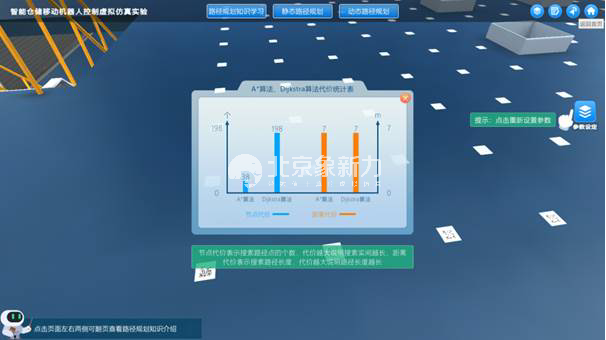
3、智能路径规划
用户选择“智能路径规划”模块,系统会介绍 A*算法、Dijkstra 算法、智能避障算法等相关知识点,并进行静态路径规划、动态路径规划。
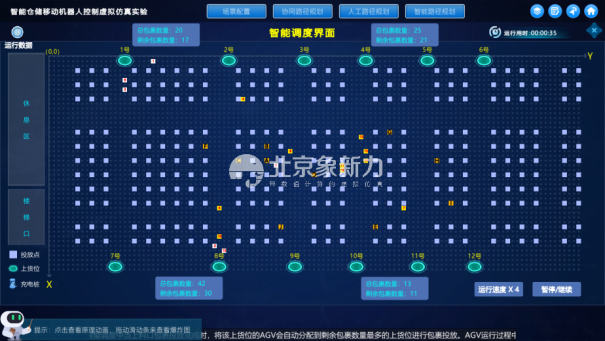
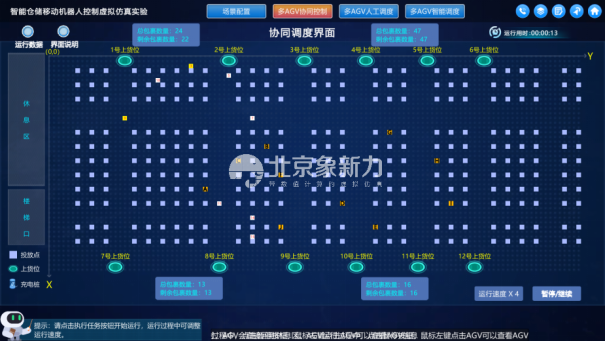
4、多 AGV 协同调度
用户选择“多 AGV 协同调度”模块,可进行场景配置,使系统能够在最短时间内完成全部包裹的投放。还可进行多AGV 协同控制、多AGV人工调度、多AGV智能调度实验。
5、故障分析与处理
用户选择“故障分析与处理”模块,系统会模拟多台 AGV 相遇的场景,用户需要先手动移开 AGV 处理故障,再设定各 AGV 状态以及 AGV 运行的优先级顺序,避免出现 AGV 锁死的故障。

四、支撑课程
本产品可广泛应用于本科和高职类院校的实训和课程教学,可匹配智能控制基础、人工智能与模式识别、自动化等课程。