



机械臂视觉控制系统虚拟仿真软件
在当今科技领域,机械臂视觉控制系统的研究与应用愈发重要。对于机械臂视觉控制系统的实现方法,众多科研人员和教育工作者都在不断探索。而机械臂视觉控制系统虚拟仿真软件,为这一领域的研究和教学带来了新的契机。
这款软件拥有广泛的应用客户,像浙大城市学院、西南石油大学、广东石油化工学院等都在使用。它在虚拟仿真实验中的机械臂应用方面表现出色,能让学生直观地感受机械臂视觉控制系统的运行。
视觉传感器是协助机械臂感知外部环境的重要手段之一,而机械臂视觉控制系统涉及机器人学、机器视觉、控制理论等多个交叉学科,是多输入输出、高速非线性、强耦合的复杂系统。此项目作为《系统建模与控制实验》和《智能控制理论与应用》课程的实践环节,使用了先进的 Maya、Unity3D 等模拟仿真机械臂动力学、视觉控制和运动轨迹等内容,让学生能亲身体验机械视觉的机械臂控制系统。在这个过程中,学生可以深入了解机械臂与视觉系统结合的实验流程,熟悉机械臂视觉控制系统的设计、控制等环节。

该软件重点解决了真实实验项目条件不具备或实际运行困难的问题,诸如涉及高成本、高消耗、不可逆操作、大型综合训练等情况。同时,开发了适合机械臂视觉控制教学的虚拟仿真实验教学平台,提供机械臂模型、视觉系统模型、基于视觉的平面对中控制算法研究等功能,这对于机械臂视觉控制的算法研究有着极大的帮助。学生通过本仿真平台的学习及实验操作,不仅能提高对机械臂视觉控制的实际运用能力,还能掌握相应设备仪器的选择使用及控制系统设计与搭建相关知识。这对于如何优化机械臂的视觉控制系统以及实现机械臂视觉控制的关键挑战的攻克都有着积极的意义。
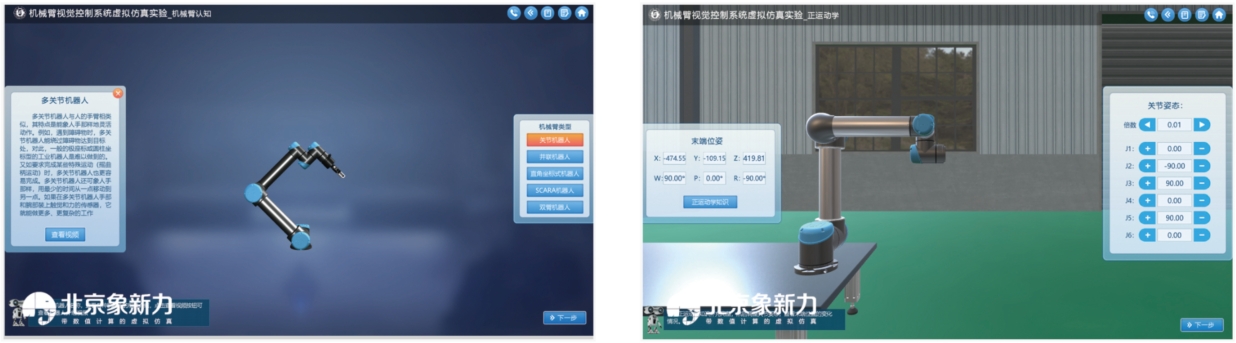
在实验内容方面,涵盖了机械臂系统认知正运动学求解、逆运动学求解视觉伺服控制、机械臂视觉系统建模、机械臂视觉伺服控制系统设计等。这些实验内容让学生能够全面地了解机械臂视觉控制系统的关键技术,进行机械臂视觉控制系统的实验验证。

从支撑课程来看,涉及机器人技术、机器人视觉与传感技术、工业机器人应用与编程等。这充分体现了机械臂视觉控制系统在工业中的应用,也反映出机械臂视觉控制系统虚拟仿真软件在教学和科研中的重要价值。