



倒立摆的控制系统设计虚拟仿真软件
在控制工程领域,倒立摆是一个经典且重要的研究对象,其控制系统设计、虚拟仿真实验等方面的研究有着广泛的应用和重要意义。
该软件已在多所高校得到应用,包括武汉理工大学、大连海事大学、宁波大学科学技术学院等。这些高校通过使用这款软件,将倒立摆控制技术更好地融入到教学中,让学生能够更深入地理解和掌握相关知识。
此软件的实验场景依照实验楼进行实景三维搭建,3D 设备真实,与实际设备结构一致。三维场景涵盖了实验室、一阶直线型倒立摆、一阶环形倒立摆、二阶直线型倒立摆、三阶直线型倒立摆等。在进行倒立摆虚拟仿真实验时,学生可以通过鼠标、键盘进行场景漫游,也能直接点击倒立摆装置进行设备定位。系统漫游拥有第一人称视角,行走过程中采用碰撞检测实现与场景设备和墙体的干涉检查,避免穿透效果,让学生可通过三维场景加深对倒立摆相关设备的认知。这其实也涉及到了倒立摆系统设计与实现的关键技术,通过虚拟场景的搭建和交互功能的实现,为学生提供了一个逼真的实验环境。

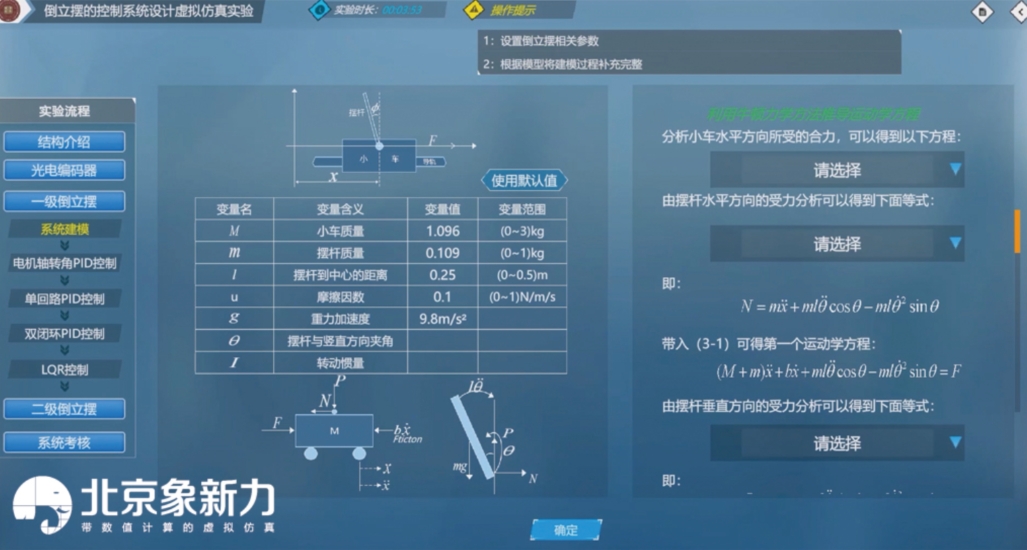
该软件的倒立摆的控制系统设计虚拟仿真实验由场景漫游、结构学习、一阶倒立摆、二阶倒立摆、考核答题五个模块组成。以一级倒立摆为主,引导实验从数学模型的建立,到线性化处理、系统状态空间方程的求解、传递函数的求解一步步分析,这也是倒立摆控制系统设计步骤的重要体现。通过这些步骤,将不稳定的倒立摆系统建立成一个可控的线性系统。并最终通过设计控制器并通过设置不同的 PID 参数进行调试,让学生通过倒立摆模型了解单回路 PID 控制、双闭环 PID 控制、LQR 控制的原理,这就是倒立摆控制系统的 PID 调节方法的实际应用。
现实中倒立摆设备昂贵,而且容易损坏,通过虚拟仿真实验,学生可以线上实时进行设计实验,不受场地和时间的限制,这充分体现了倒立摆虚拟仿真实验的应用优势。同时,该软件也为倒立摆控制技术在教学中的应用提供了有力支持,让学生能够在虚拟环境中进行各种实验和研究。